偷得浮生半桶水(半日闲), 好记性不如抄下来(烂笔头). 信息爆炸的时代, 学习是一项持续的工作.
全部博文(1778)
分类: 其他平台
2020-06-12 11:29:47
在学习以上这些基础技术课程的基础上,ROS需要灵活应用这些技能,并且在高年级的学习中修炼综合能力:

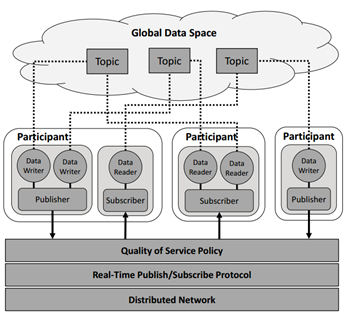
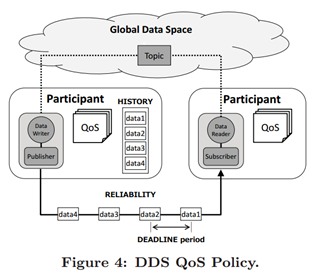
参与者(DomainParticipant):一个参与者Participant就是一个容器,对应于一个使用DDS的用户,任何DDS的用户都必须通过Participant来访问全局数据空间。
发布者(Publisher):数据发布的执行者,支持多种数据类型的发布,可以与多个数据写入器(DataWriter)相联,发布一种或多种主题(Topic)的消息。
订阅者(Subscriber):数据订阅的执行者,支持多种数据类型的订阅,可以与多个数据读取器(DataReader)相联,订阅一种或多种主题(Topic)的消息。
数据写入器(DataWriter):应用向发布者更新数据的对象,每个数据写入器对应一个特定的Topic,类似于ROS1中的一个消息发布者。
数据读取器(DataReader):应用从订阅者读取数据的对象,每个数据读取器对应一个特定的Topic,类似于ROS1中的一个消息订阅者。
主题(Topic):和ROS1中的Topic概念一致,一个Topic包含一个名称和一种数据结构。