全部博文(396)
分类: 嵌入式
2018-08-14 15:14:13
主要参考:
tty驱动分析 :
Linux TTY驱动--Uart_driver底层:http://blog.csdn.net/sharecode/article/details/9196591
Linux TTY驱动--Serial Core层 :http://blog.csdn.net/sharecode/article/details/9197567
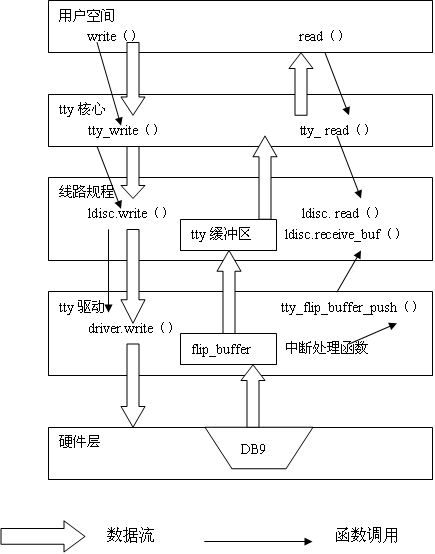
整个 uart 框架大概的样子如上图所示,简单来分的话可以说成两层,一层是下层我们的串口驱动层,它直接与硬件相接触,我们需要填充一个 struct uart_ops 的结构体,另一层是上层 tty 层,包括 tty 核心以及线路规程,它们各自都有一个 Ops 结构,用户空通过间是 tty 注册的字符设备节点来访问,这么说来如上图所示涉及到了4个 ops 结构了,层层跳转。下面,就来分析分析它们的层次结构。
在 s3c2440 平台,它是这样来注册串口驱动的,分配一个struct uart_driver 简单填充,并调用uart_register_driver 注册到内核中去。
-
static struct uart_driver s3c24xx_uart_drv = {
-
.owner = THIS_MODULE,
-
.dev_name = "s3c2410_serial",
-
.nr = CONFIG_SERIAL_SAMSUNG_UARTS,
-
.cons = S3C24XX_SERIAL_CONSOLE,
-
.driver_name = S3C24XX_SERIAL_NAME,
-
.major = S3C24XX_SERIAL_MAJOR,
-
.minor = S3C24XX_SERIAL_MINOR,
-
};
-
static int __init s3c24xx_serial_modinit(void)
-
{
-
int ret;
-
-
ret = uart_register_driver(&s3c24xx_uart_drv);
-
if (ret < 0) {
-
printk(KERN_ERR "failed to register UART driver\n");
-
return -1;
-
}
-
-
return 0;
-
}
uart_driver 中,我们只是填充了一些名字、设备号等信息,这些都是不涉及底层硬件访问的,那是怎么回事呢?来看一下完整的 uart_driver 结构或许就明白了。
-
struct uart_driver {
-
struct module *owner; /* 拥有该uart_driver的模块,一般为THIS_MODULE */
-
const char *driver_name; /* 串口驱动名,串口设备文件名以驱动名为基础 */
-
const char *dev_name; /* 串口设备名 */
-
int major; /* 主设备号 */
-
int minor; /* 次设备号 */
-
int nr; /* 该uart_driver支持的串口个数(最大) */
-
struct console *cons; /* 其对应的console.若该uart_driver支持serial console,否则为NULL */
-
-
/* 下面这俩,它们应该被初始化为NULL */
-
struct uart_state *state; "white-space:pre"> /* 下层,串口驱动层 */
-
struct tty_driver *tty_driver; /* tty相关 */
-
};
在我们上边填充的结构体中,有两个成员未被赋值,对于tty_driver 代表的是上层,它会在 register_uart_driver 中的过程中赋值,而uart_state 则代表下层,uart_state
也会在register_uart_driver 的过程中分配空间,但是它里面真正设置硬件相关的东西是 uart_state->uart_port ,这个uart_port 是需要我们从其它地方调用 uart_add_one_port 来添加的。 1、下层(串口驱动层)
首先,我们需要认识这几个结构体
-
struct uart_state {
-
struct tty_port port;
-
-
int pm_state;
-
struct circ_buf xmit;
-
-
struct tasklet_struct tlet;
-
struct uart_port *uart_port; // 对应于一个串口设备
-
};
在注册 driver 时,会根据 uart_driver->nr 来申请 nr 个 uart_state 空间,用来存放驱动所支持的串口(端口)的物理信息。
-
struct uart_port {
-
spinlock_t lock; /* port lock */
-
unsigned long iobase; /* io端口基地址(物理) */
-
unsigned char __iomem *membase; /* io内存基地址(虚拟) */
-
unsigned int (*serial_in)(struct uart_port *, int);
-
void (*serial_out)(struct uart_port *, int, int);
-
unsigned int irq; /* 中断号 */
-
unsigned long irqflags; /* 中断标志 */
-
unsigned int uartclk; /* 串口时钟 */
-
unsigned int fifosize; /* 串口缓冲区大小 */
-
unsigned char x_char; /* xon/xoff char */
-
unsigned char regshift; /* 寄存器位移 */
-
unsigned char iotype; /* IO访问方式 */
-
unsigned char unused1;
-
-
unsigned int read_status_mask; /* 关心 Rx error status */
-
unsigned int ignore_status_mask; /* 忽略 Rx error status */
-
struct uart_state *state; /* pointer to parent state */
-
struct uart_icount icount; /* 串口信息计数器 */
-
-
struct console *cons; /* struct console, if any */
-
#if defined(CONFIG_SERIAL_CORE_CONSOLE) || defined(SUPPORT_SYSRQ)
-
unsigned long sysrq; /* sysrq timeout */
-
#endif
-
-
upf_t flags;
-
-
unsigned int mctrl; /* 当前的Moden 设置 */
-
unsigned int timeout; /* character-based timeout */
-
unsigned int type; /* 端口类型 */
-
const struct uart_ops *ops; /* 串口端口操作函数 */
-
unsigned int custom_divisor;
-
unsigned int line; /* 端口索引 */
-
resource_size_t mapbase; /* io内存物理基地址 */
-
struct device *dev; /* 父设备 */
-
unsigned char hub6; /* this should be in the 8250 driver */
-
unsigned char suspended;
-
unsigned char unused[2];
-
void *private_data; /* generic platform data pointer */
-
};
这个结构体,是需要我们自己来填充的,比如我们 s3c2440 有3个串口,那么就需要填充3个 uart_port
,并且通过 uart_add_one_port 添加到 uart_driver->uart_state->uart_port
中去。当然 uart_driver 有多个 uart_state ,每个 uart_state 有一个 uart_port
。在 uart_port 里还有一个非常重要的成员 struct uart_ops *ops
,这个也是需要我们自己来实现的,一般芯片厂家都写好了吧?或者只需要稍作修改。
-
struct uart_ops {
-
unsigned int (*tx_empty)(struct uart_port *); /* 串口的Tx FIFO缓存是否为空 */
-
void (*set_mctrl)(struct uart_port *, unsigned int mctrl); /* 设置串口modem控制 */
-
unsigned int (*get_mctrl)(struct uart_port *); /* 获取串口modem控制 */
-
void (*stop_tx)(struct uart_port *); /* 禁止串口发送数据 */
-
void (*start_tx)(struct uart_port *); /* 使能串口发送数据 */
-
void (*send_xchar)(struct uart_port *, char ch); /* 发送xChar */
-
void (*stop_rx)(struct uart_port *); /* 禁止串口接收数据 */
-
void (*enable_ms)(struct uart_port *); /* 使能modem的状态信号 */
-
void (*break_ctl)(struct uart_port *, int ctl); /* 设置break信号 */
-
int (*startup)(struct uart_port *); /* 启动串口,应用程序打开串口设备文件时,该函数会被调用 */
-
void (*shutdown)(struct uart_port *);/* 关闭串口,应用程序关闭串口设备文件时,该函数会被调用 */
-
void (*flush_buffer)(struct uart_port *);
-
void (*set_termios)(struct uart_port *, struct ktermios *new,
-
struct ktermios *old); /* 设置串口参数 */
-
void (*set_ldisc)(struct uart_port *);/* 设置线路规程 */
-
void (*pm)(struct uart_port *, unsigned int state,
-
unsigned int oldstate); /* 串口电源管理 */
-
int (*set_wake)(struct uart_port *, unsigned int state);
-
-
/*
-
* Return a string describing the type of the port
-
*/
-
const char *(*type)(struct uart_port *);
-
-
/*
-
* Release IO and memory resources used by the port.
-
* This includes iounmap if necessary.
-
*/
-
void (*release_port)(struct uart_port *);
-
-
/*
-
* Request IO and memory resources used by the port.
-
* This includes iomapping the port if necessary.
-
*/
-
int (*request_port)(struct uart_port *); /* 申请必要的IO端口/IO内存资源,必要时还可以重新映射串口端口 */
-
void (*config_port)(struct uart_port *, int); /* 执行串口所需的自动配置 */
-
int (*verify_port)(struct uart_port *, struct serial_struct *); /* 核实新串口的信息 */
-
int (*ioctl)(struct uart_port *, unsigned int, unsigned long);
-
#ifdef CONFIG_CONSOLE_POLL
-
void (*poll_put_char)(struct uart_port *, unsigned char);
-
int (*poll_get_char)(struct uart_port *);
-
#endif
-
};
实在是太复杂了。。。但这一层就跟裸机程序一样,用来操作硬件寄存器,只不过内核把“格式”给我们规定死了。2、上层(tty 核心层)
tty 层要从 register_uart_driver 来看起了,因为 tty_driver 是在注册过程中构建的,我们也就顺便了解了注册过程~。
-
int uart_register_driver(struct uart_driver *drv)
-
{
-
struct tty_driver *normal = NULL;
-
int i, retval;
-
-
-
/* 根据driver支持的最大设备数,申请n个 uart_state 空间,每一个 uart_state 都有一个uart_port */
-
drv->state = kzalloc(sizeof(struct uart_state) * drv->nr, GFP_KERNEL);
-
-
/* tty层:分配一个 tty_driver ,并将drv->tty_driver 指向它 */
-
normal = alloc_tty_driver(drv->nr);
-
drv->tty_driver = normal;
-
-
/* 对 tty_driver 进行设置 */
-
normal->owner = drv->owner;
-
normal->driver_name = drv->driver_name;
-
normal->name = drv->dev_name;
-
normal->major = drv->major;
-
normal->minor_start = drv->minor;
-
normal->type = TTY_DRIVER_TYPE_SERIAL;
-
normal->subtype = SERIAL_TYPE_NORMAL;
-
normal->init_termios = tty_std_termios;
-
normal->init_termios.c_cflag = B9600 | CS8 | CREAD | HUPCL | CLOCAL;
-
normal->init_termios.c_ispeed = normal->init_termios.c_ospeed = 9600;
-
normal->flags = TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV;
-
normal->driver_state = drv;
-
-
tty_set_operations(normal, &uart_ops);
-
-
/*
-
* Initialise the UART state(s).
-
*/
-
for (i = 0; i < drv->nr; i++) {
-
struct uart_state *state = drv->state + i;
-
struct tty_port *port = &state->port; /* driver->state->tty_port */
-
-
tty_port_init(port);
-
port->close_delay = 500; /* .5 seconds */
-
port->closing_wait = 30000; /* 30 seconds */
-
/* 初始化 tasklet */
-
tasklet_init(&state->tlet, uart_tasklet_action,
-
(unsigned long)state);
-
}
-
-
/* tty层:注册 driver->tty_driver */
-
retval = tty_register_driver(normal);
-
-
}
-
注册过程干了哪些事:
1、根据driver支持的最大设备数,申请n个 uart_state 空间,每一个 uart_state 都有一个 uart_port 。
2、分配一个 tty_driver ,并将drv->tty_driver 指向它。
3、对 tty_driver 进行设置,其中包括默认波特率、校验方式等,还有一个重要的 Ops ,uart_ops ,它是tty核心与我们串口驱动通信的接口。
4、初始化每一个 uart_state 的 tasklet 。
5、注册 tty_driver 。
注册 uart_driver 实际上是注册 tty_driver,因此与用户空间打交道的工作完全交给了 tty_driver ,而且这一部分都是内核实现好的,我们不需要修改,了解一下工作原理即可。
-
static const struct tty_operations uart_ops = {
-
.open = uart_open,
-
.close = uart_close,
-
.write = uart_write,
-
.put_char = uart_put_char, // 单字节写函数
-
.flush_chars = uart_flush_chars, // 刷新数据到硬件函数
-
.write_room = uart_write_room, // 指示多少缓冲空闲的函数
-
.chars_in_buffer= uart_chars_in_buffer, // 只是多少缓冲满的函数
-
.flush_buffer = uart_flush_buffer, // 刷新数据到硬件
-
.ioctl = uart_ioctl,
-
.throttle = uart_throttle,
-
.unthrottle = uart_unthrottle,
-
.send_xchar = uart_send_xchar,
-
.set_termios = uart_set_termios, // 当termios设置被改变时又tty核心调用
-
.set_ldisc = uart_set_ldisc, // 设置线路规程函数
-
.stop = uart_stop,
-
.start = uart_start,
-
.hangup = uart_hangup, // 挂起函数,当驱动挂起tty设备时调用
-
.break_ctl = uart_break_ctl, // 线路中断控制函数
-
.wait_until_sent= uart_wait_until_sent,
-
#ifdef CONFIG_PROC_FS
-
.proc_fops = &uart_proc_fops,
-
#endif
-
.tiocmget = uart_tiocmget, // 获得当前tty的线路规程的设置
-
.tiocmset = uart_tiocmset, // 设置当前tty线路规程的设置
-
#ifdef CONFIG_CONSOLE_POLL
-
.poll_init = uart_poll_init,
-
.poll_get_char = uart_poll_get_char,
-
.poll_put_char = uart_poll_put_char,
-
#endif
-
};
这个是 tty 核心的 Ops ,简单一看,后面分析调用关系时,我们在来看具体的里边的函数,下面来看 tty_driver 的注册。
-
int tty_register_driver(struct tty_driver *driver)
-
{
-
int error;
-
int i;
-
dev_t dev;
-
void **p = NULL;
-
-
if (!(driver->flags & TTY_DRIVER_DEVPTS_MEM) && driver->num) {
-
p = kzalloc(driver->num * 2 * sizeof(void *), GFP_KERNEL);
-
}
-
-
/* 如果没有主设备号则申请 */
-
if (!driver->major) {
-
error = alloc_chrdev_region(&dev, driver->minor_start,
-
driver->num, driver->name);
-
} else {
-
dev = MKDEV(driver->major, driver->minor_start);
-
error = register_chrdev_region(dev, driver->num, driver->name);
-
}
-
-
if (p) { /* 为线路规程和termios分配空间 */
-
driver->ttys = (struct tty_struct **)p;
-
driver->termios = (struct ktermios **)(p + driver->num);
-
} else {
-
driver->ttys = NULL;
-
driver->termios = NULL;
-
}
-
-
/* 创建字符设备,使用 tty_fops */
-
cdev_init(&driver->cdev, &tty_fops);
-
driver->cdev.owner = driver->owner;
-
error = cdev_add(&driver->cdev, dev, driver->num);
-
-
mutex_lock(&tty_mutex);
-
-
/* 将该 driver->tty_drivers 添加到全局链表 tty_drivers */
-
list_add(&driver->tty_drivers, &tty_drivers);
-
mutex_unlock(&tty_mutex);
-
-
if (!(driver->flags & TTY_DRIVER_DYNAMIC_DEV)) {
-
for (i = 0; i < driver->num; i++)
-
tty_register_device(driver, i, NULL);
-
}
-
-
/* proc 文件系统注册driver */
-
proc_tty_register_driver(driver);
-
driver->flags |= TTY_DRIVER_INSTALLED;
-
return 0;
-
}
tty_driver 注册过程干了哪些事:
1、为线路规程和termios分配空间,并使 tty_driver 相应的成员指向它们。
2、注册字符设备,名字是 uart_driver->name 我们这里是“ttySAC”,文件操作函数集是 tty_fops。
3、将该 uart_driver->tty_drivers 添加到全局链表 tty_drivers 。
4、向 proc 文件系统添加 driver ,这个暂时不了解。
至此,文章起初的结构图中的4个ops已经出现了3个,另一个关于线路规程的在哪?继续看吧。
3、调用关系分析
tty_driver 不是注册了一个字符设备么,那我们就以它的 tty_fops 入手,以 open、read、write 为例,看看用户空间是如何访问到最底层的硬件操作函数的。
3.1 tty_open
-
static int tty_open(struct inode *inode, struct file *filp)
-
{
-
int ret;
-
-
lock_kernel();
-
ret = __tty_open(inode, filp);
-
unlock_kernel();
-
return ret;
-
}
为了方便分析,我把看不懂的代码都删掉了- -!!!
-
static int __tty_open(struct inode *inode, struct file *filp)
-
{
-
struct tty_struct *tty = NULL;
-
int noctty, retval;
-
struct tty_driver *driver;
-
int index;
-
dev_t device = inode->i_rdev;
-
unsigned saved_flags = filp->f_flags;
-
...
-
//在全局tty_drivers链表中获取Core注册的tty_driver
-
driver = get_tty_driver(device, &index);
-
-
tty = tty_init_dev(driver, index, 0); // tty->ops = driver->ops;
-
-
filp->private_data = tty;
-
-
if (tty->ops->open)
-
/* 调用tty_driver->tty_foperation->open */
-
retval = tty->ops->open(tty, filp);
-
-
return 0;
-
}
从 tty_drivers 全局链表获取到前边我们注册进去的 tty_driver ,然后分配设置一个 struct tty_struct 的东西,最后调用 tty_struct->ops->open 函数,其实 tty_struct->ops == tty_driver->ops 。
-
struct tty_struct *tty_init_dev(struct tty_driver *driver, int idx, int first_ok)
-
{
-
struct tty_struct *tty;
-
int retval;
-
/* 分配一个 tty_struct */
-
tty = alloc_tty_struct();
-
-
/* 初始化 tty ,设置线路规程 Ops 等 */
-
initialize_tty_struct(tty, driver, idx);
-
-
//tty_ldisc_open(tty, ld)-> return ld->ops->open(tty) -> n_tty_open
-
retval = tty_ldisc_setup(tty, tty->link);
-
-
return tty;
-
}
-
void initialize_tty_struct(struct tty_struct *tty,
-
struct tty_driver *driver, int idx)
-
{
-
memset(tty, 0, sizeof(struct tty_struct));
-
-
/* 设置线路规程为 N_TTY */
-
tty_ldisc_init(tty);//struct tty_ldisc *ld = tty_ldisc_get(N_TTY);tty_ldisc_assign(tty, ld);
-
-
...
-
tty_buffer_init(tty);
-
tty->driver = driver;
-
-
/* 初始化等待队列头 */
-
init_waitqueue_head(&tty->write_wait);
-
init_waitqueue_head(&tty->read_wait);
-
-
/* 将driver->ops 拷贝到 tty->ops */
-
tty->ops = driver->ops;
-
tty->index = idx;
-
}
-
void tty_buffer_init(struct tty_struct *tty)
-
{
-
spin_lock_init(&tty->buf.lock);
-
tty->buf.head = NULL;
-
tty->buf.tail = NULL;
-
tty->buf.free = NULL;
-
tty->buf.memory_used = 0;
-
-
/* 初始化延时工作队列 */
-
INIT_DELAYED_WORK(&tty->buf.work, flush_to_ldisc);
-
}
整个 tty_open 的工作:
1、获取到 tty_driver
2、根据 tty_driver 初始化一个 tty_struct
2.1 设置 tty_struct 的线路规程为 N_TTY (不同类型的线路规程有不同的 ops)
2.2 初始化一个延时工作队列,唤醒时调用flush_to_ldisc ,读函数时我们需要分析它。
2.3 初始化 tty_struct 里的两个等待队列头。
2.4 设置 tty_struct->ops == tty_driver->ops 。
3、在 tty_ldisc_setup 函数中调用到线路规程的open函数,对于 N_TTY 来说是 n_tty_open 。
4、如果 tty_struct->ops 也就是 tty_driver->ops 定义了 open 函数则调用,显然是有的 uart_open 。
对于 n_tty_open ,它应该是对线路规程如何“格式化数据”进行设置,太复杂了,忽略掉吧,跟我们没多大关系了。对于 uart_open 还是有必要贴代码一看的。
-
static int uart_open(struct tty_struct *tty, struct file *filp)
-
{
-
struct uart_driver *drv = (struct uart_driver *)tty->driver->driver_state;
-
struct uart_state *state;
-
struct tty_port *port;
-
int retval, line = tty->index;
-
-
state = uart_get(drv, line);
-
port = &state->port;
-
tty->driver_data = state;
-
state->uart_port->state = state;
-
-
/* uport->ops->startup(uport) 调用到最底层的ops里的startup 函数*/
-
retval = uart_startup(state, 0);
-
-
}
根据 tty_struct 获取到 uart_driver ,再由 uart_driver 获取到里面 uart_state->uart_port->ops->startup 调用它。至此,open函数分析完毕,它不是简单的 “打开”,还有大量的初始化工作,最终调用到最底层的 startup 函数。
3.2 tty_write
-
static ssize_t tty_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos)
-
{
-
struct tty_struct *tty;
-
struct inode *inode = file->f_path.dentry->d_inode;
-
ssize_t ret;
-
struct tty_ldisc *ld;
-
-
tty = (struct tty_struct *)file->private_data;
-
-
ld = tty_ldisc_ref_wait(tty);
-
if (!ld->ops->write)
-
ret = -EIO;
-
else
-
/* 调用 线路规程 n_tty_write 函数 */
-
ret = do_tty_write(ld->ops->write, tty, file, buf, count);
-
tty_ldisc_deref(ld);
-
return ret;
-
}
-
static ssize_t n_tty_write(struct tty_struct *tty, struct file *file,
-
const unsigned char *buf, size_t nr)
-
{
-
const unsigned char *b = buf;
-
DECLARE_WAITQUEUE(wait, current);
-
int c;
-
ssize_t retval = 0;
-
// 将当前进程添加到等待队列
-
add_wait_queue(&tty->write_wait, &wait);
-
while (1) {
-
// 设置当前进程为可中断的
-
set_current_state(TASK_INTERRUPTIBLE);
-
if (signal_pending(current)) {
-
retval = -ERESTARTSYS;
-
break;
-
}
-
if (tty_hung_up_p(file) || (tty->link && !tty->link->count)) {
-
retval = -EIO;
-
break;
-
}
-
/* 自行定义了输出方式 */
-
if (O_OPOST(tty) && !(test_bit(TTY_HW_COOK_OUT, &tty->flags))) {
-
....
-
} else {
-
while (nr > 0) {
-
/* 调用到 uart_write */
-
c = tty->ops->write(tty, b, nr);
-
if (c < 0) {
-
retval = c;
-
goto break_out;
-
}
-
if (!c)
-
break;
-
b += c;
-
nr -= c;
-
}
-
}
-
if (!nr)
-
break;
-
if (file->f_flags & O_NONBLOCK) {
-
retval = -EAGAIN;
-
break;
-
}
-
// 进程调度 开始休眠
-
schedule();
-
}
-
}
n_tty_write 调用 tty->ops->write 也就是 uart_write .
-
static int uart_write(struct tty_struct *tty, const unsigned char *buf, int count)
-
{
-
uart_start(tty);
-
return ret;
-
}
-
-
static void uart_start(struct tty_struct *tty)
-
{
-
__uart_start(tty);
-
}
-
-
static void __uart_start(struct tty_struct *tty)
-
{
-
struct uart_state *state = tty->driver_data;
-
struct uart_port *port = state->uart_port;
-
-
if (!uart_circ_empty(&state->xmit) && state->xmit.buf &&
-
!tty->stopped && !tty->hw_stopped)
-
/* 调用到最底层的 start_tx */
-
port->ops->start_tx(port);
-
}
uart_write 又调用到了最底层的 uart_port->ops->start_tx 函数。
猜测一下,大概“写”的思路:
1、将当前进程加入到等待队列
2、设置当前进程为可打断的
3、层层调用最终调用到底层的 start_tx 函数,将要发送的数据存入 DATA 寄存器,由硬件自动发送。
4、进程调度,当前进程进入休眠。
5、硬件发送完成,进入中断处理函数,唤醒对面队列。
当然这只是我自己意淫的,到底是不是这样,具体分析底层操作函数的时候应该会明白。
3.2 tty_read
-
static ssize_t tty_read(struct file *file, char __user *buf, size_t count,
-
loff_t *ppos)
-
{
-
int i;
-
struct tty_struct *tty;
-
struct inode *inode;
-
struct tty_ldisc *ld;
-
-
tty = (struct tty_struct *)file->private_data;
-
inode = file->f_path.dentry->d_inode;
-
-
/* We want to wait for the line discipline to sort out in this
-
situation */
-
ld = tty_ldisc_ref_wait(tty);
-
/* 调用线路规程 n_tty_read */
-
if (ld->ops->read)
-
i = (ld->ops->read)(tty, file, buf, count);
-
else
-
i = -EIO;
-
tty_ldisc_deref(ld);
-
if (i > 0)
-
inode->i_atime = current_fs_time(inode->i_sb);
-
return i;
-
}
调用线路规程的 read 函数,对于 N_TTY 来说是 n_tty_read ,删掉了一堆看不懂的代码,还是有很多
-
static ssize_t n_tty_read(struct tty_struct *tty, struct file *file,
-
unsigned char __user *buf, size_t nr)
-
{
-
unsigned char __user *b = buf;
-
DECLARE_WAITQUEUE(wait, current);
-
int c;
-
int minimum, time;
-
ssize_t retval = 0;
-
ssize_t size;
-
long timeout;
-
unsigned long flags;
-
int packet;
-
-
do_it_again:
-
-
BUG_ON(!tty->read_buf);
-
-
c = job_control(tty, file);
-
-
minimum = time = 0;
-
timeout = MAX_SCHEDULE_TIMEOUT;
-
/* 如果是非标准模式 */
-
if (!tty->icanon) {
-
...
-
}
-
-
packet = tty->packet;
-
-
add_wait_queue(&tty->read_wait, &wait);
-
while (nr) {
-
/* First test for status change. */
-
if (packet && tty->link->ctrl_status) {
-
/* 看不懂的都删掉 */
-
}
-
/* This statement must be first before checking for input
-
so that any interrupt will set the state back to
-
TASK_RUNNING. */
-
set_current_state(TASK_INTERRUPTIBLE);
-
-
if (((minimum - (b - buf)) < tty->minimum_to_wake) &&
-
((minimum - (b - buf)) >= 1))
-
tty->minimum_to_wake = (minimum - (b - buf));
-
-
if (!input_available_p(tty, 0)) {
-
/* 看不懂的都删掉 */
-
-
/* FIXME: does n_tty_set_room need locking ? */
-
n_tty_set_room(tty);
-
/* 进程调度 休眠 */
-
timeout = schedule_timeout(timeout);
-
continue;
-
}
-
__set_current_state(TASK_RUNNING);
-
-
/* Deal with packet mode. */
-
if (packet && b == buf) {
-
/* 看不懂的都删掉 */
-
}
-
-
/* 如果是标准模式 */
-
if (tty->icanon) {
-
/* N.B. avoid overrun if nr == 0 */
-
while (nr && tty->read_cnt) {
-
int eol;
-
-
eol = test_and_clear_bit(tty->read_tail,
-
tty->read_flags);
-
-
/* 从tty->read_buf 获取数据 */
-
c = tty->read_buf[tty->read_tail];
-
spin_lock_irqsave(&tty->read_lock, flags);
-
tty->read_tail = ((tty->read_tail+1) &
-
(N_TTY_BUF_SIZE-1));
-
tty->read_cnt--;
-
if (eol) {
-
/* this test should be redundant:
-
* we shouldn't be reading data if
-
* canon_data is 0
-
*/
-
if (--tty->canon_data < 0)
-
tty->canon_data = 0;
-
}
-
spin_unlock_irqrestore(&tty->read_lock, flags);
-
-
if (!eol || (c != __DISABLED_CHAR)) {
-
/* 将数据拷贝到用户空间 */
-
if (tty_put_user(tty, c, b++)) {
-
retval = -EFAULT;
-
b--;
-
break;
-
}
-
nr--;
-
}
-
if (eol) {
-
tty_audit_push(tty);
-
break;
-
}
-
}
-
if (retval)
-
break;
-
} else {
-
/* 非标准模式不关心删掉 */
-
}
-
....
-
}
-
mutex_unlock(&tty->atomic_read_lock);
-
remove_wait_queue(&tty->read_wait, &wait);
-
-
if (!waitqueue_active(&tty->read_wait))
-
tty->minimum_to_wake = minimum;
-
-
__set_current_state(TASK_RUNNING);
-
...
-
n_tty_set_room(tty);
-
return retval;
-
}
“读”过程干了哪些事:
1、将当前进程加入等待队列
2、设置当前进程可中断
3、进程调度,当前进程进入休眠
4、在某处被唤醒
5、从 tty->read_buf 取出数据,通过 tty_put_user 拷贝到用户空间。
那么,在何处唤醒,猜测应该是在中断处理函数中,当DATA寄存器满,触发中断,中断处理函数中调用 tty_flip_buffer_push 。
-
void tty_flip_buffer_push(struct tty_struct *tty)
-
{
-
unsigned long flags;
-
spin_lock_irqsave(&tty->buf.lock, flags);
-
if (tty->buf.tail != NULL)
-
tty->buf.tail->commit = tty->buf.tail->used;
-
spin_unlock_irqrestore(&tty->buf.lock, flags);
-
-
if (tty->low_latency)
-
flush_to_ldisc(&tty->buf.work.work);
-
else
-
schedule_delayed_work(&tty->buf.work, 1);
-
}
tty_flip_buffer_push 有两种方式调用到 flush_to_ldisc ,一种直接调用,另一种使用延时工作队列,在很久很久以前,我们初始化了这么一个工作队列~(tty_open 初始化 tty_struct 时前面有提到)。
在 flush_to_ldisc 会调用到 disc->ops->receive_buf ,对于 N_TTY 来说是 n_tty_receive_buf ,在 n_tty_receive_buf 中,将数据拷贝到 tty->read_buf ,然后 wake_up_interruptible(&tty->read_wait) 唤醒休眠队列。然后就是前面提到的,在n_tty_read 函数中 从 tty->read_buf 里取出数据 拷贝到用户空间了。
至此,关于 uart 的框架分析基本就结束了~对于 tty 以及线路规程是什么东西,大概了解是个什么东西。虽然大部分东西都不需要我们自己实现,但是了解它们有益无害~
下一篇文章,以 s3c2440 为例,分析底层的操作函数,以及 s3c2440 是如何初始化 uart_port 结构的~,这些是在移植驱动过程中需要做的工作~