全部博文(396)
分类: 嵌入式
2019-03-27 21:34:38
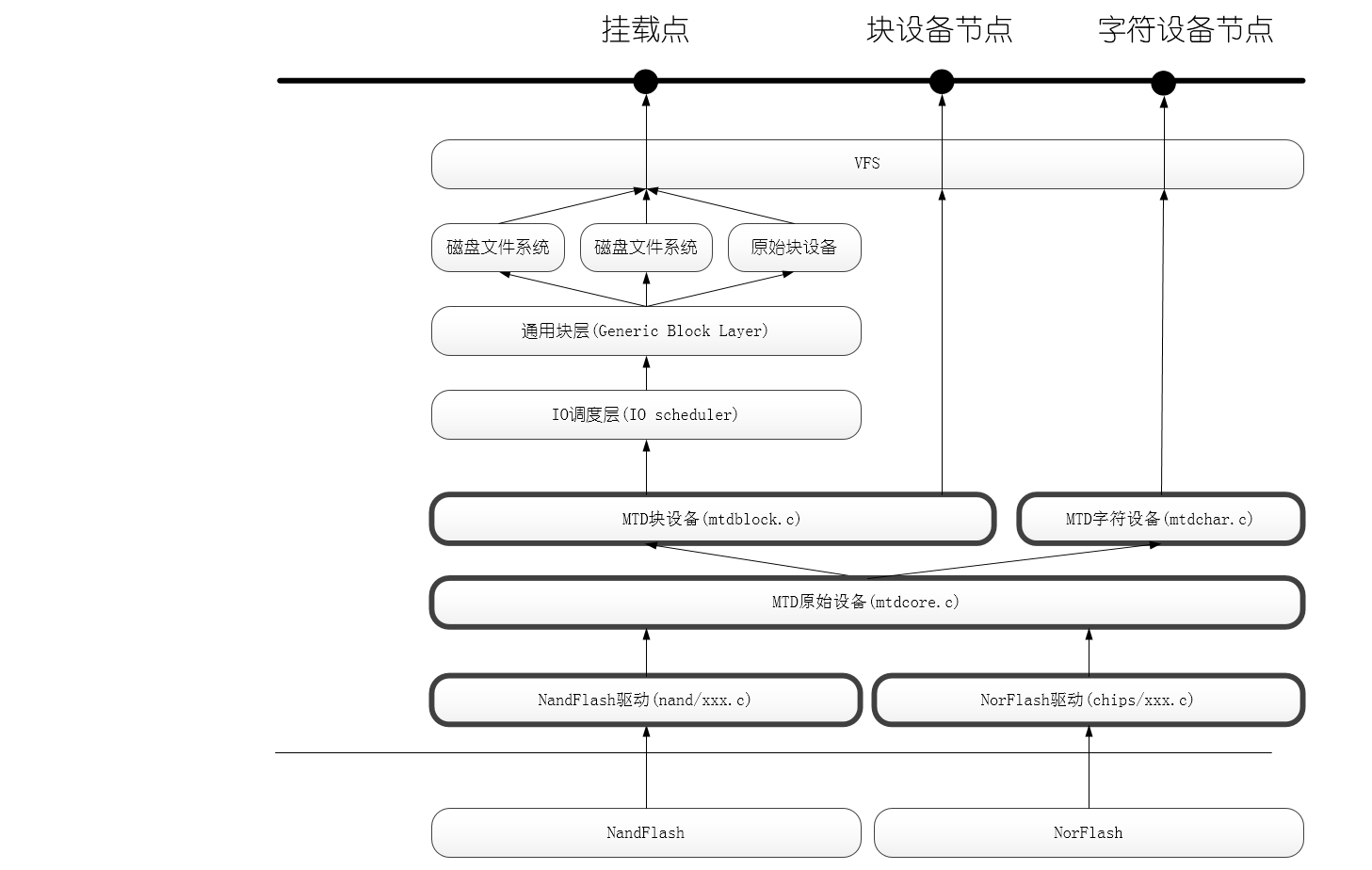
MTD(Memory Technology Device)即常说的Flash等使用存储芯片的存储设备,MTD子系统对应的是块设备驱动框架中的设备驱动层,可以说,MTD就是针对Flash设备设计的标准化硬件驱动框架。本文基于3.14内核,讨论MTD驱动框架。
为了实现上述的框架, 内核中使用了如下类和API, 这些几乎是开发一个MTD驱动必须的
本身是没有list_head来供内核管理,对mtd_info对象的管理是通过mtd_part来实现的。mtd_info对象属于原始设备层,里面的很多函数接口内核已经实现了。mtd_info中的read()/write()等操作是MTD设备驱动要实现的主要函数,在NORFlash或NANDFlash中的驱动代码中几乎看不到mtd_info的成员函数,即这些函数对于Flash芯片是透明的,因为Linux在MTD的下层实现了针对NORFlash和NANDFlash的通用的mtd_info函数。
114 struct mtd_info { 115 u_char type; 116 uint32_t flags; 117 uint64_t size; // Total size of the MTD 118 123 uint32_t erasesize; 131 uint32_t writesize; 132 142 uint32_t writebufsize; 143 144 uint32_t oobsize; // Amount of OOB data per block (e.g. 16) 145 uint32_t oobavail; // Available OOB bytes per block 146 151 unsigned int erasesize_shift; 152 unsigned int writesize_shift; 153 /* Masks based on erasesize_shift and writesize_shift */ 154 unsigned int erasesize_mask; 155 unsigned int writesize_mask; 156 164 unsigned int bitflip_threshold; 165 166 // Kernel-only stuff starts here. 167 const char *name; 168 int index; 169 170 /* ECC layout structure pointer - read only! */ 171 struct nand_ecclayout *ecclayout; 172 173 /* the ecc step size. */ 174 unsigned int ecc_step_size; 175 176 /* max number of correctible bit errors per ecc step */ 177 unsigned int ecc_strength; 178 179 /* Data for variable erase regions. If numeraseregions is zero, 180 * it means that the whole device has erasesize as given above. 181 */ 182 int numeraseregions; 183 struct mtd_erase_region_info *eraseregions; 184 185 /* 186 * Do not call via these pointers, use corresponding mtd_*() 187 * wrappers instead. 188 */ 189 int (*_erase) (struct mtd_info *mtd, struct erase_info *instr); 190 int (*_point) (struct mtd_info *mtd, loff_t from, size_t len, 191 size_t *retlen, void **virt, resource_size_t *phys); 192 int (*_unpoint) (struct mtd_info *mtd, loff_t from, size_t len); 193 unsigned long (*_get_unmapped_area) (struct mtd_info *mtd, 194 unsigned long len, 195 unsigned long offset, 196 unsigned long flags); 197 int (*_read) (struct mtd_info *mtd, loff_t from, size_t len, 198 size_t *retlen, u_char *buf); 199 int (*_write) (struct mtd_info *mtd, loff_t to, size_t len, 200 size_t *retlen, const u_char *buf); 201 int (*_panic_write) (struct mtd_info *mtd, loff_t to, size_t len, 202 size_t *retlen, const u_char *buf); 203 int (*_read_oob) (struct mtd_info *mtd, loff_t from, 204 struct mtd_oob_ops *ops); 205 int (*_write_oob) (struct mtd_info *mtd, loff_t to, 206 struct mtd_oob_ops *ops); 207 int (*_get_fact_prot_info) (struct mtd_info *mtd, struct otp_info *buf, 208 size_t len); 209 int (*_read_fact_prot_reg) (struct mtd_info *mtd, loff_t from, 210 size_t len, size_t *retlen, u_char *buf); 211 int (*_get_user_prot_info) (struct mtd_info *mtd, struct otp_info *buf, 212 size_t len); 213 int (*_read_user_prot_reg) (struct mtd_info *mtd, loff_t from, 214 size_t len, size_t *retlen, u_char *buf); 215 int (*_write_user_prot_reg) (struct mtd_info *mtd, loff_t to, 216 size_t len, size_t *retlen, u_char *buf); 217 int (*_lock_user_prot_reg) (struct mtd_info *mtd, loff_t from, 218 size_t len); 219 int (*_writev) (struct mtd_info *mtd, const struct kvec *vecs, 220 unsigned long count, loff_t to, size_t *retlen); 221 void (*_sync) (struct mtd_info *mtd); 222 int (*_lock) (struct mtd_info *mtd, loff_t ofs, uint64_t len); 223 int (*_unlock) (struct mtd_info *mtd, loff_t ofs, uint64_t len); 224 int (*_is_locked) (struct mtd_info *mtd, loff_t ofs, uint64_t len); 225 int (*_block_isbad) (struct mtd_info *mtd, loff_t ofs); 226 int (*_block_markbad) (struct mtd_info *mtd, loff_t ofs); 227 int (*_suspend) (struct mtd_info *mtd); 228 void (*_resume) (struct mtd_info *mtd); 229 /* 230 * If the driver is something smart, like UBI, it may need to maintain 231 * its own reference counting. The below functions are only for driver. 232 */ 233 int (*_get_device) (struct mtd_info *mtd); 234 void (*_put_device) (struct mtd_info *mtd); 235 236 /* Backing device capabilities for this device 237 * - provides mmap capabilities 238 */ 239 struct backing_dev_info *backing_dev_info; 240 241 struct notifier_block reboot_notifier; /* default mode before reboot */ 242 243 /* ECC status information */ 244 struct mtd_ecc_stats ecc_stats; 245 /* Subpage shift (NAND) */ 246 int subpage_sft; 247 248 void *priv; 249 250 struct module *owner; 251 struct device dev; 252 int usecount; 253 };
struct mtd_info
--115-->MTD设备类型,有MTD_RAM,MTD_ROM、MTD_NORFLASH、MTD_NAND_FLASH
--116-->读写及权限标志位,有MTD_WRITEABLE、MTD_BIT_WRITEABLE、MTD_NO_ERASE、MTD_UP_LOCK
--117-->MTD设备的大小
--123-->主要的擦除块大小,NandFlash就是"块"的大小
--131-->最小可写字节数,NandFlash一般对应"页"的大小
--144-->一个block中的OOB字节数
--145-->一个block中可用oob的字节数
--171-->ECC布局结构体指针
--190-->针对eXecute-In-Place,即XIP
--192-->如果这个指针为空,不允许XIP
--197-->读函数指针
--199-->写函数指针
--248-->私有数据
内核管理分区的链表节点,通过它来实现对mtd_info对象的管理。
41 struct mtd_part { 42 struct mtd_info mtd; 43 struct mtd_info *master; 44 uint64_t offset; 45 struct list_head list; 46 };
struct mtd_part
--42-->对应的mtd_info对象
--43-->父对象指针
--44-->偏移量
--45-->链表节点
描述一个分区
39 struct mtd_partition { 40 const char *name; /* identifier string */ 41 uint64_t size; /* partition size */ 42 uint64_t offset; /* offset within the master MTD space */ 43 uint32_t mask_flags; /* master MTD flags to mask out for this partition */ 44 struct nand_ecclayout *ecclayout; /* out of band layout for this partition (NAND only) */ 45 };
mtd_partition
--40-->分区名
--41-->分区大小,使用MTDPART_SIZ_FULL表示使用全部空间
--42-->分区在master设备中的偏移量。MTDPART_OFS_APPEND表示从上一个分区结束的地方开始,MTDPART_OFS_NXTBLK表示从下一个擦除块开始; MTDPART_OFS_RETAIN表示尽可能向后偏,把size大小的空间留下即可
--43-->权限掩码,MTD_WRITEABLE表示将父设备的只读选项变成可写(可写分区要求size和offset要erasesize对齐,eg MTDPART_OFS_NEXTBLK)
--44-->NANDFlash的OOB布局,OOB是NANDFlash中很有用空间,比如yaffs2就需要将坏块信息存储在OOB区域
链表头,将所有的mtd_partition连接起来。
36 /* Our partition linked list */ 37 static LIST_HEAD(mtd_partitions);
下图是关键API的调用关系。
mtd_add_partition()
└── add_mtd_device()
add_mtd_partitions()
└── add_mtd_device()
分配并初始化一个mtd对象。
367 334 int add_mtd_device(struct mtd_info *mtd) 335 { 336 struct mtd_notifier *not; 337 int i, error; 338 339 if (!mtd->backing_dev_info) { 340 switch (mtd->type) { 341 case MTD_RAM: 342 mtd->backing_dev_info = &mtd_bdi_rw_mappable; 343 break; 344 case MTD_ROM: 345 mtd->backing_dev_info = &mtd_bdi_ro_mappable; 346 break; 347 default: 348 mtd->backing_dev_info = &mtd_bdi_unmappable; 349 break; 350 } 351 } 355 356 i = idr_alloc(&mtd_idr, mtd, 0, 0, GFP_KERNEL); 357 if (i < 0) 358 goto fail_locked; 359 360 mtd->index = i; 361 mtd->usecount = 0; 362 363 /* default value if not set by driver */ 364 if (mtd->bitflip_threshold == 0) 365 mtd->bitflip_threshold = mtd->ecc_strength; 366 367 if (is_power_of_2(mtd->erasesize)) 368 mtd->erasesize_shift = ffs(mtd->erasesize) - 1; 369 else 370 mtd->erasesize_shift = 0; 371 372 if (is_power_of_2(mtd->writesize)) 373 mtd->writesize_shift = ffs(mtd->writesize) - 1; 374 else 375 mtd->writesize_shift = 0; 376 377 mtd->erasesize_mask = (1 << mtd->erasesize_shift) - 1; 378 mtd->writesize_mask = (1 << mtd->writesize_shift) - 1; 379 380 /* Some chips always power up locked. Unlock them now */ 381 if ((mtd->flags & MTD_WRITEABLE) && (mtd->flags & MTD_POWERUP_LOCK)) { 382 error = mtd_unlock(mtd, 0, mtd->size); 387 } 388 392 mtd->dev.type = &mtd_devtype; 393 mtd->dev.class = &mtd_class; 394 mtd->dev.devt = MTD_DEVT(i); 395 dev_set_name(&mtd->dev, "mtd%d", i); 396 dev_set_drvdata(&mtd->dev, mtd); 397 if (device_register(&mtd->dev) != 0) 399 400 if (MTD_DEVT(i)) 401 device_create(&mtd_class, mtd->dev.parent, 402 MTD_DEVT(i) + 1, 403 NULL, "mtd%dro", i); 408 list_for_each_entry(not, &mtd_notifiers, list) 409 not->add(mtd); 417 return 0; 424 }
add_mtd_device()
--395-->设置MTD设备的名字
--396-->设置私有数据,将mtd地址藏到device->device_private->void* driver_data
--408-->遍历所有的mtd_notifier,将其添加到通知链
通过将一个mtd_part对象注册到内核,将mtd_info对象注册到内核,即为一个设备添加一个分区。
537 int mtd_add_partition(struct mtd_info *master, const char *name, 538 long long offset, long long length) 539 { 540 struct mtd_partition part; 541 struct mtd_part *p, *new; 542 uint64_t start, end; 543 int ret = 0; 545 /* the direct offset is expected */ 546 if (offset == MTDPART_OFS_APPEND || 547 offset == MTDPART_OFS_NXTBLK) 548 return -EINVAL; 549 550 if (length == MTDPART_SIZ_FULL) 551 length = master->size - offset; 552 553 if (length <= 0) 554 return -EINVAL; 555 556 part.name = name; 557 part.size = length; 558 part.offset = offset; 559 part.mask_flags = 0; 560 part.ecclayout = NULL; 561 562 new = allocate_partition(master, &part, -1, offset); 563 if (IS_ERR(new)) 564 return PTR_ERR(new); 565 566 start = offset; 567 end = offset + length; 568 569 mutex_lock(&mtd_partitions_mutex); 570 list_for_each_entry(p, &mtd_partitions, list) 571 if (p->master == master) { 572 if ((start >= p->offset) && 573 (start < (p->offset + p->mtd.size))) 574 goto err_inv; 575 576 if ((end >= p->offset) && 577 (end < (p->offset + p->mtd.size))) 578 goto err_inv; 579 } 580 581 list_add(&new->list, &mtd_partitions); 582 mutex_unlock(&mtd_partitions_mutex); 583 584 add_mtd_device(&new->mtd); 585 586 return ret; 591 }
添加一个分区表到内核,一个MTD设备一个分区表
626 int add_mtd_partitions(struct mtd_info *master, 627 const struct mtd_partition *parts, 628 int nbparts) 629 { 630 struct mtd_part *slave; 631 uint64_t cur_offset = 0; 632 int i; 636 for (i = 0; i < nbparts; i++) { 637 slave = allocate_partition(master, parts + i, i, cur_offset); 642 list_add(&slave->list, &mtd_partitions); 645 add_mtd_device(&slave->mtd); 647 cur_offset = slave->offset + slave->mtd.size; 648 } 649 650 return 0; 651 }
MTD设备提供了字符设备和块设备两种接口,对于字符设备接口,在"drivers/mtd/mtdchar.c"中实现了,比如,用户程序可以直接通过ioctl()回调相应的驱动实现。其中下面的几个是这些操作中常用的结构,这些结构是对用户空间开放的,类似于输入子系统中的input_event结构。
//include/uapi/mtd/mtd-abi.h 125 struct mtd_info_user { 126 __u8 type; 127 __u32 flags; 128 __u32 size; /* Total size of the MTD */ 129 __u32 erasesize; 130 __u32 writesize; 131 __u32 oobsize; /* Amount of OOB data per block (e.g. 16) */ 132 __u64 padding; /* Old obsolete field; do not use */ 133 };
描述NandFlash的OOB(Out Of Band)信息。
35 struct mtd_oob_buf { 36 __u32 start; 37 __u32 length; 38 unsigned char __user *ptr; 39 };
25 struct erase_info_user { 26 __u32 start; 27 __u32 length; 28 };
mtd_oob_buf oob;
erase_info_user erase;
mtd_info_user meminfo; /* 获得设备信息 */ if(0 != ioctl(fd, MEMGETINFO, &meminfo))
perror("MEMGETINFO"); /* 擦除块 */ if(0 != ioctl(fd, MEMERASE, &erase))
perror("MEMERASE"); /* 读OOB */ if(0 != ioctl(fd, MEMREADOOB, &oob))
perror("MEMREADOOB"); /* 写OOB??? */ if(0 != ioctl(fd, MEMWRITEOOB, &oob))
perror("MEMWRITEOOB"); /* 检查坏块 */ if(blockstart != (ofs & (~meminfo.erase + 1))){
blockstart = ofs & (~meminfo.erasesize + 1); if((badblock = ioctl(fd, MEMGETBADBLOCK, &blockstart)) < 0)
perror("MEMGETBADBLOCK"); else if(badblock) /* 坏块代码 */ else /* 好块代码 */ }
NANDFlash和NORFlash都是基于MTD框架编写的,由于MTD框架中通用代码已经在内核中实现了,所以驱动开发主要是进行MTD框架中的的开发。
下图就是NORFlash驱动在MTD驱动框架中的位置
基于上述的MTD框架, Flash驱动都变的十分的简单, 因为当下Flash的操作接口已经很统一, a, 相应的代码在"drivers/mtd/chips"中文件实现,所以在设备驱动层, 留给驱动工程师的工作就大大的减少了。
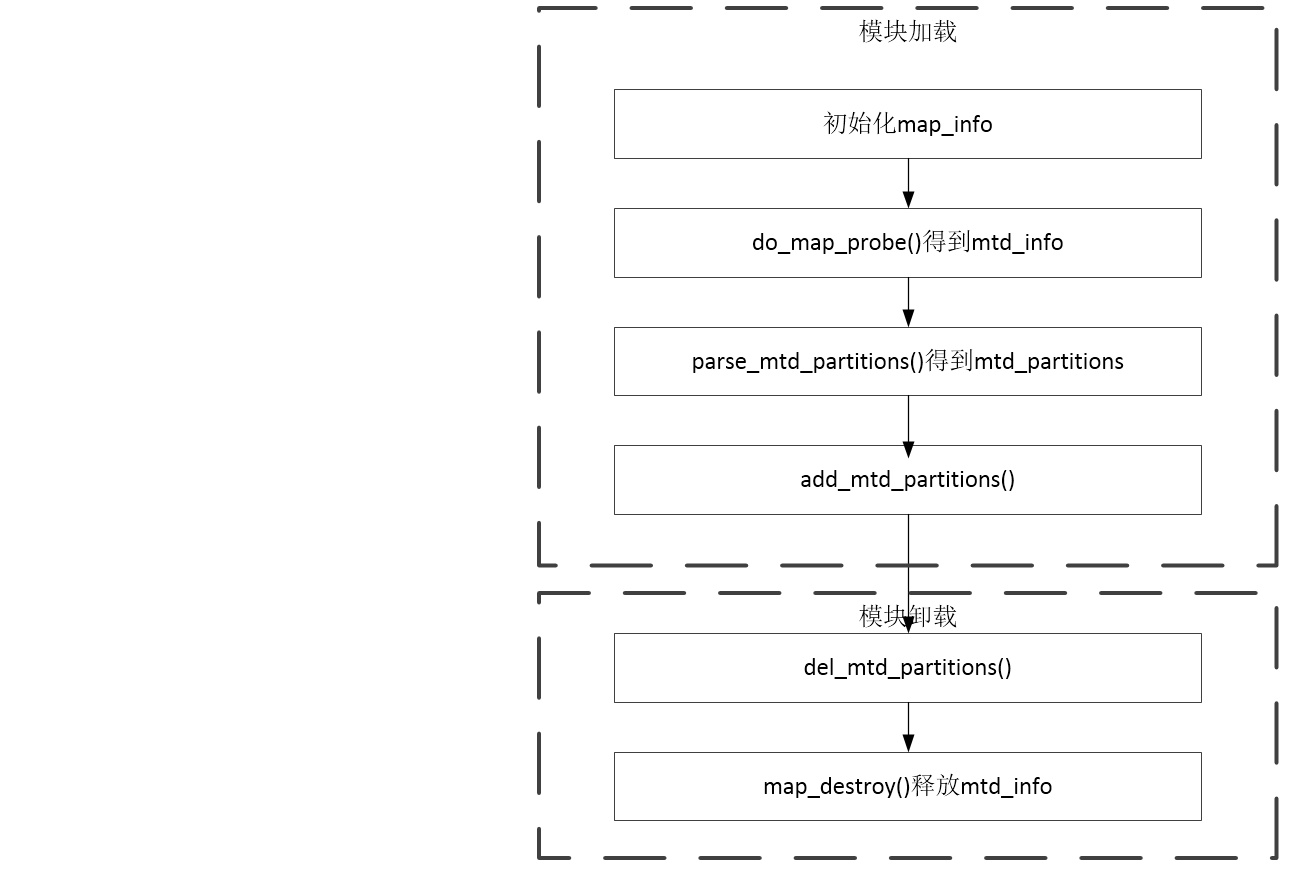
基于MTD子系统开发NOR FLash驱动,只需要构造一个map_info类型的对象并调用do_map_probe()来匹配内核中已经写好的驱动,比如CFI接口的驱动或JEDEC接口的驱动。当下编写一个NorFlash驱动的工作流程如下
208 struct map_info { 209 const char *name; 210 unsigned long size; 211 resource_size_t phys; 212 #define NO_XIP (-1UL) 214 void __iomem *virt; 215 void *cached; 217 int swap; /* this mapping's byte-swapping requirement */ 218 int bankwidth; 243 void (*set_vpp)(struct map_info *, int); 245 unsigned long pfow_base; 246 unsigned long map_priv_1; 247 unsigned long map_priv_2; 248 struct device_node *device_node; 249 void *fldrv_priv; 250 struct mtd_chip_driver *fldrv; 251 };
struct map_info
--210-->NOR Flash设备的容量
--211-->NOR Flash在物理地址空间中的地址
--214-->由物理地址映射的虚拟地址
--218-->总线宽度,NOR Flash是有地址总线的,所以才能片上执行,一般都是8位或16位宽
构造好一个map_info对象之后,接下来的工作就是匹配驱动+注册分区表
这个API用来根据传入的参数匹配一个map_info对象的驱动,比如CFI接口或JEDEC接口的NOR Flash。这个函数的接口如下:
struct mtd_info *do_map_probe(const char *name, struct map_info *map)
对于常用的NorFlash标准,这个函数的调用方式如下:
do_map_probe("cfi_probe", &xxx_map_info); do_map_probe("jedec_probe",&xxx_map_info); do_map_probe("map_rom",&xxx_map_info);
匹配了设备驱动,可以发现一个map_info对象中没有mtd_partitions相关的信息,对于一个NOR Flash的分区信息,需要通过do_map_probe返回的mtd_info对象来注册到内核。这里我们可以先调用parse_mtd_partitions()查看Flash上已有的分区信息,获取了分区信息之后再调用add_mtd_partitions()将分区信息写入内核
#define WINDOW_SIZE ... #define WINDOW_ADDR ... static struct map_info xxx_map = { .name = "xxx flash",
.size = WINDOW_SIZE,
.bankwidth = 1,
.phys = WINDOW_ADDR,
}; static struct mtd_partition xxx_partitions[] = { .name = "Drive A",
.offset = 0,
.size = 0x0e000,
}; #define NUM_PARTITIONS ARRAY_SIZE(xxx_partitions) static struct mtd_info *mymtd; static int __init init_xxx_map(void) { int rc = 0;
xxx_map.virt = ioremap_nocache(xxx_map.phys, xxx_map.size); if(!xxx_map.virt){
printk(KERN_ERR"Failed to ioremap_nocache\n");
rc = -EIO; goto err2;
}
simple_map_init(&xxx_map);
mymtd = do_map_probe("jedec_probe", &xxx_map); if(!mymtd){
rc = -ENXIO; goto err1;
}
mymtd->owner = THIS_MODULE;
add_mtd_partitions(mymtd, xxx_partitions, NUM_PARTITIONS); return 0;
err1:
map_destroy(mymtd);
iounmap(xxx_map.virt);
err2: return rc;
} static void __exit cleanup_xxx_map(void) { if(mymtd){
del_mtd_partitions(mymtd);
map_destroy(mymtd);
} if(xxx_map.virt){
iounmap(xxx_map.virt);
xxx_map.virt = NULL;
}
}
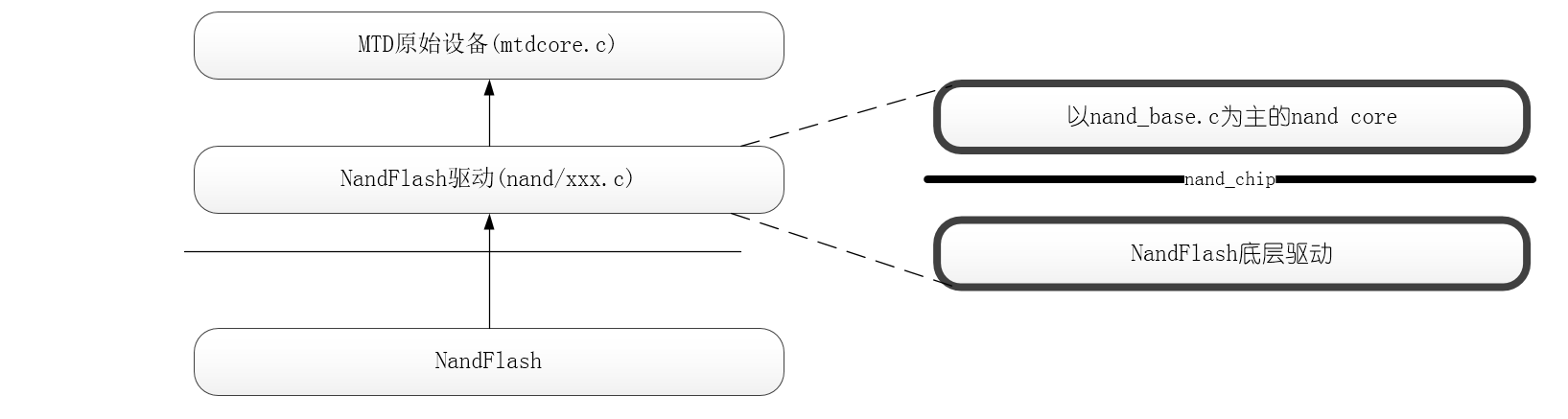
下图就是基于MTD框架的NandFlash驱动的位置。
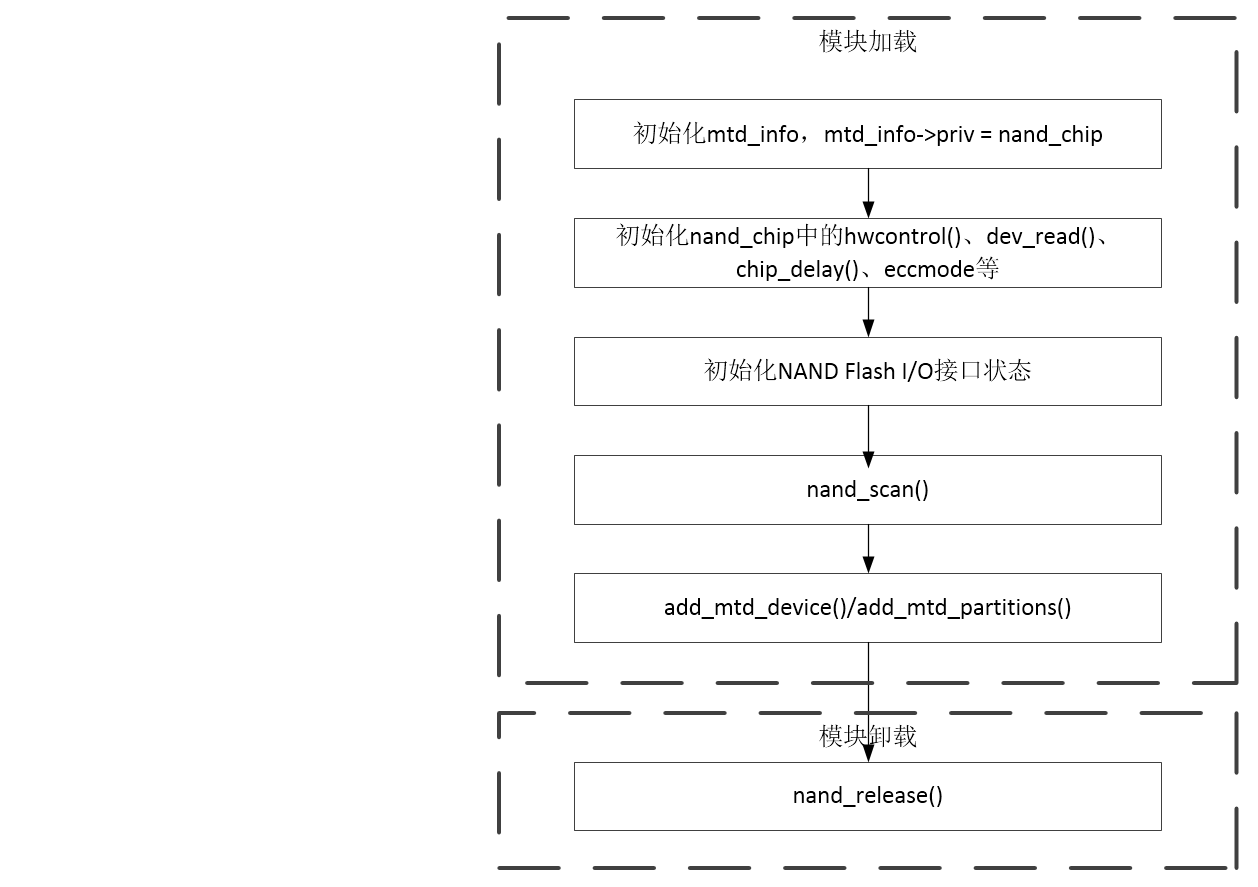
Nand Flash和NOR Flash类似,内核中已经在"drivers/mtd/nand/nand_base.c"中实现了通用的驱动程序,驱动开发中不需要再实现mtd_info中的read, write, read_oob, write_oob等接口,只需要构造并注册一个nand_chip对象, 这个对象主要描述了一片flash芯片的相关信息,包括地址信息,读写方法,ECC模式,硬件控制等一系列底层机制。当下,编写一个NandFlash驱动的工作流程如下:
这个结构描述一个NAND Flash设备,通常藏在mtd_info->priv中,以便在回调其中的接口的时候可以找到nand_chip对象。
547 struct nand_chip { 548 void __iomem *IO_ADDR_R; 549 void __iomem *IO_ADDR_W; 550 551 uint8_t (*read_byte)(struct mtd_info *mtd); 578 579 int chip_delay; 580 unsigned int options; 581 unsigned int bbt_options; 582 583 int page_shift; 584 int phys_erase_shift; 585 int bbt_erase_shift; 586 int chip_shift; 587 int numchips; 588 uint64_t chipsize; 589 int pagemask; 590 int pagebuf; 591 unsigned int pagebuf_bitflips; 592 int subpagesize; 593 uint8_t bits_per_cell; 594 uint16_t ecc_strength_ds; 595 uint16_t ecc_step_ds; 596 int badblockpos; 597 int badblockbits; 598 599 int onfi_version; 600 struct nand_onfi_params onfi_params; 601 602 int read_retries; 603 604 flstate_t state; 605 606 uint8_t *oob_poi; 607 struct nand_hw_control *controller; 608 609 struct nand_ecc_ctrl ecc; 610 struct nand_buffers *buffers; 611 struct nand_hw_control hwcontrol; 612 613 uint8_t *bbt; 614 struct nand_bbt_descr *bbt_td; 615 struct nand_bbt_descr *bbt_md; 616 617 struct nand_bbt_descr *badblock_pattern; 618 619 void *priv; 620 };
struct nand_chip
--609-->NAND芯片的OOB分布和模式,如果不赋值,则会使用内核默认的OOB
--580-->与具体的NAND 芯片相关的一些选项,如NAND_BUSWIDTH_16 等,可以参考
--583-->用位表示的NAND 芯片的page 大小,如某片NAND 芯片的一个page 有512 个字节,那么page_shift 就是9 ;
--584-->用位表示的NAND 芯片的每次可擦除的大小,如某片NAND 芯片每次可擦除16K 字节( 通常就是一个block 的大小) ,那么phys_erase_shift 就是14 ;
--585-->用位表示的bad block table 的大小,通常一个bbt 占用一个block ,所以bbt_erase_shift 通常与phys_erase_shift 相等;
--587-->表示系统中有多少片NAND 芯片;
--588-->NAND 芯片的大小;
--589-->计算page number 时的掩码,总是等于chipsize/page 大小 - 1 ;
--590-->用来保存当前读取的NAND 芯片的page number ,这样一来,下次读取的数据若还是属于同一个page ,就不必再从NAND 芯片读取了,而是从data_buf 中直接得到;
--596-->表示坏块信息保存在oob 中的第几个字节。对于绝大多数的NAND 芯片,若page size> 512,那么坏块信息从Byte 0 开始存储,否则就存储在Byte 5 ,即第六个字节。
--619-->私有数据
准备好了一个nand_chip,接下来的工作就是匹配驱动+注册分区表。
NAND flash使用nand_scan()来匹配驱动,这个函数会读取NAND芯片的ID,并根据mtd->priv即nand_chip中的成员初始化mtd_info。如果要分区,则以mtd_info和mtd_partition为参数调用add_mtd_partitions来添加分区信息。
int nand_scan(struct mtd_info *mtd, int maxchips)
#define CHIP_PHYSICAL_ADDRESS ... #define NUM_PARTITIONS 2 static struct mtd_partition partition_info[] = {
{
.name = "Flash partition 1",
.info = 0,
.size = 8 * 1024 * 1024,
},
{
.name = "Flash partition 2",
offset = MTDPART_OFS_NEXT,
size = MTDPART_SIZ_FULL,
},
}; int __init board_init(void) { struct nand_chip *this; int err = 0; /* 为MTD设备对象和nand_chip分配内存 */ board_mtd = kmalloc(sizeof(struct mtd_info) + sizeof(struct nand_chip),GFP_KERNEL); if(!board_mtd){
printk("Unable to allocate NAND MTD device structure\n");
err = -ENOMEM; goto out;
} /* 初始化结构体 */ memset((char *)board_mtd, 0 ,sizeof(struct mtd_info) + sizeof(struct nand_chip)); /* 映射物理地址 */ baseaddr = (unsigned long) ioremap(CHIP_PHYSICAL_ADDRESS,1024); if(!baseaddr){
printk("Ioremap to access NAND Chip failed\n");
err = -EIO; goto out_mtd;
} /* 获取私有数据(nand_chip)指针 */ this = (struct nand_chip *)(&board_mtd[1]); /* 将nand_chip赋予mtd_info私有指针 */ board_mtd->priv = this; /* 设置NAND Flash的IO基地址 */ this->IO_ADDR_R = baseaddr; this->IO_ADDR_W = baseaddr; /* 硬件控制函数 */ this->cmd_ctrl = board_hwcontrol; /* 初始化设备ready函数 */ this->dev_ready = board_dev_ready; /* 扫描以确定设备的存在 */ if(nand_scan(board_mtd, 1)){
err = -ENXIO; goto = out_ior;
} /* 添加分区 */ add_mtd_partitions(board_mtd,partition_info,NUM_PARTITIONS); goto out;
out_ior:
iounmap((void *)baseaddr);
out_mtd:
kfree(board_mtd); out: return err;
} static void __exit board_cleanup(void) { /* 释放资源,注销设备 */ nand_release(board_mtd); /* unmap物理地址 */ iounmap((void *)baseaddr); /* 释放MTD设备结构体 */ kfree(board_mtd);
} /* 硬件控制 */ static void board_hwcontrol(struct mtd_info *mtd, int dat,unsigned int ctrl) {
... if(ctrl & NAND_CTRL_CHANGE){ if(ctrl & NAND_NCE){
}
}
...
} /*返回ready状态*/ static int board_dev_ready(struct mtd_info *mtd) { return xxx_read_ready_bit();
}