分类: 嵌入式
2015-12-11 11:06:02
原文地址:实例解析linux内核I2C体系结构(1) 作者:enzo26
实例解析linux内核I2C体系结构(1)
作者:刘洪涛,讲师。
一、概述
谈到在linux系统下编写I2C驱动,目前主要有两种方式,一种是把I2C设备当作一个普通的字符设备来处理,另一种是利用linux I2C驱动体系结构来完成。下面比较下这两种驱动。
第一种方法的好处(对应第二种方法的劣势)有:
● 思路比较直接,不需要花时间去了解linux内核中复杂的I2C子系统的操作方法。
第一种方法问题(对应第二种方法的好处)有:
● 要求工程师不仅要对I2C设备的操作熟悉,而且要熟悉I2C的适配器操作;
● 要求工程师对I2C的设备器及I2C的设备操作方法都比较熟悉,最重要的是写出的程序可移植性差;
● 对内核的资源无法直接使用。因为内核提供的所有I2C设备器及设备驱动都是基于I2C子系统的格式。I2C适配器的操作简单还好,如果遇到复杂的I2C适配器(如:基于PCI的I2C适配器),工作量就会大很多。
本文针对的对象是熟悉I2C协议,并且想使用linux内核子系统的开发人员。
网络和一些书籍上有介绍I2C子系统的源码结构。但发现很多开发人员看了这些文章后,还是 不清楚自己究竟该做些什么。究其原因还是没弄清楚I2C子系统为我们做了些什么,以及我们怎样利用I2C子系统。本文首先要解决是如何利用现有内核支持的 I2C适配器,完成对I2C设备的操作,然后再过度到适配器代码的编写。本文主要从解决问题的角度去写,不会涉及特别详细的代码跟踪。
二、I2C设备驱动程序编写
首先要明确适配器驱动的作用是让我们能够通过它发出符合I2C标准协议的时序。
在Linux内核源代码中的drivers/i2c/busses目录下包含着一些适配器的驱动。如S3C2410的驱动i2c-s3c2410.c。当适配器加载到内核后,接下来的工作就要针对具体的设备编写设备驱动了。
编写I2C设备驱动也有两种方法。一种是利用系统给我们提供的i2c-dev.c来实现一 个i2c适配器的设备文件。然后通过在应用层操作i2c适配器来控制i2c设备。另一种是为i2c设备,独立编写一个设备驱动。注意:在后一种情况下,是 不需要使用i2c-dev.c的。
1、利用i2c-dev.c操作适配器,进而控制i2c设备
i2c-dev.c并没有针对特定的设备而设计,只是提供了通用的read()、write()和ioctl()等接口,应用层可以借用这些接口访问挂接在适配器上的i2c设备的存储空间或寄存器,并控制I2C设备的工作方式。
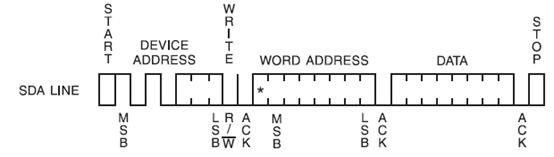
需要特别注意的是:i2c-dev.c的read()、write()方法都只适合于如下方式的数据格式(可查看内核相关源码)
![]()
图1 单开始信号时序
所以不具有太强的通用性,如下面这种情况就不适用(通常出现在读目标时)。
![]()
图2 多开始信号时序
而且read()、write()方法只适用用于适配器支持i2c算法的情况,如:
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
而不适合适配器只支持smbus算法的情况,如:
static const struct i2c_algorithm smbus_algorithm = {
.smbus_xfer = i801_access,
.functionality = i801_func,
};
基于上面几个原因,所以一般都不会使用i2c-dev.c的read()、write()方法。最常用的是ioctl()方法。ioctl()方法可以实现上面所有的情况(两种数据格式、以及I2C算法和smbus算法)。
针对i2c的算法,需要熟悉struct i2c_rdwr_ioctl_data 、struct i2c_msg。使用的命令是I2C_RDWR。
struct i2c_rdwr_ioctl_data {
struct i2c_msg __user *msgs; /* pointers to i2c_msgs */
__u32 nmsgs; /* number of i2c_msgs */
};
struct i2c_msg {
_ _u16 addr; /* slave address */
_ _u16 flags; /* 标志(读、写) */
_ _u16 len; /* msg length */
_ _u8 *buf; /* pointer to msg data */
};
针对smbus算法,需要熟悉struct i2c_smbus_ioctl_data。使用的命令是I2C_SMBUS。对于smbus算法,不需要考虑“多开始信号时序”问题。
struct i2c_smbus_ioctl_data {
__u8 read_write; //读、写
__u8 command; //命令
__u32 size; //数据长度标识
union i2c_smbus_data __user *data; //数据
};
下面以一个实例讲解操作的具体过程。通过S3C2410操作AT24C02 e2prom。实现在AT24C02中任意位置的读、写功能。
首先在内核中已经包含了对s3c2410 中的i2c控制器驱动的支持。提供了i2c算法(非smbus类型的,所以后面的ioctl的命令是I2C_RDWR)
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
另外一方面需要确定为了实现对AT24C02 e2prom的操作,需要确定AT24C02的地址及读写访问时序。
● AT24C02地址的确定
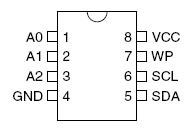

原理图上将A2、A1、A0都接地了,所以地址是0x50。
● AT24C02任意地址字节写的时序
可见此时序符合前面提到的“单开始信号时序”
● AT24C02任意地址字节读的时序

可见此时序符合前面提到的“多开始信号时序”
下面开始具体代码的分析(代码在2.6.22内核上测试通过):
/*i2c_test.c
* hongtao_liu
*/
#include
#include
#include
#include
#include
#include
#include
#include
#define I2C_RETRIES 0x0701
#define I2C_TIMEOUT 0x0702
#define I2C_RDWR 0x0707
/*********定义struct i2c_rdwr_ioctl_data和struct i2c_msg,要和内核一致*******/
struct i2c_msg
{
unsigned short addr;
unsigned short flags;
#define I2C_M_TEN 0x0010
#define I2C_M_RD 0x0001
unsigned short len;
unsigned char *buf;
};
struct i2c_rdwr_ioctl_data
{
struct i2c_msg *msgs;
int nmsgs;
/* nmsgs这个数量决定了有多少开始信号,对于“单开始时序”,取1*/
};
/***********主程序***********/
int main()
{
int fd,ret;
struct i2c_rdwr_ioctl_data e2prom_data;
fd=open("/dev/i2c-0",O_RDWR);
/*
*/dev/i2c-0是在注册i2c-dev.c后产生的,代表一个可操作的适配器。如果不使用i2c-dev.c
*的方式,就没有,也不需要这个节点。
*/
if(fd<0)
{
perror("open error");
}
e2prom_data.nmsgs=2;
/*
*因为操作时序中,最多是用到2个开始信号(字节读操作中),所以此将
*e2prom_data.nmsgs配置为2
*/
e2prom_data.msgs=(struct i2c_msg*)malloc(e2prom_data.nmsgs*sizeof(struct i2c_msg));
if(!e2prom_data.msgs)
{
perror("malloc error");
exit(1);
}
ioctl(fd,I2C_TIMEOUT,1);/*超时时间*/
ioctl(fd,I2C_RETRIES,2);/*重复次数*/
/***write data to e2prom**/
e2prom_data.nmsgs=1;
(e2prom_data.msgs[0]).len=2; //1个 e2prom 写入目标的地址和1个数据
(e2prom_data.msgs[0]).addr=0x50;//e2prom 设备地址
(e2prom_data.msgs[0]).flags=0; //write
(e2prom_data.msgs[0]).buf=(unsigned char*)malloc(2);
(e2prom_data.msgs[0]).buf[0]=0x10;// e2prom 写入目标的地址
(e2prom_data.msgs[0]).buf[1]=0x58;//the data to write
ret=ioctl(fd,I2C_RDWR,(unsigned long)&e2prom_data);
if(ret<0)
{
perror("ioctl error1");
}
sleep(1);
/******read data from e2prom*******/
e2prom_data.nmsgs=2;
(e2prom_data.msgs[0]).len=1; //e2prom 目标数据的地址
(e2prom_data.msgs[0]).addr=0x50; // e2prom 设备地址
(e2prom_data.msgs[0]).flags=0;//write
(e2prom_data.msgs[0]).buf[0]=0x10;//e2prom数据地址
(e2prom_data.msgs[1]).len=1;//读出的数据
(e2prom_data.msgs[1]).addr=0x50;// e2prom 设备地址
(e2prom_data.msgs[1]).flags=I2C_M_RD;//read
(e2prom_data.msgs[1]).buf=(unsigned char*)malloc(1);//存放返回值的地址。
(e2prom_data.msgs[1]).buf[0]=0;//初始化读缓冲
ret=ioctl(fd,I2C_RDWR,(unsigned long)&e2prom_data);
if(ret<0)
{
perror("ioctl error2");
}
printf("buff[0]=%x\n",(e2prom_data.msgs[1]).buf[0]);
/***打印读出的值,没错的话,就应该是前面写的0x58了***/
close(fd);
return 0;
}
以上讲述了一种比较常用的利用i2c-dev.c操作i2c设备的方法,这种方法可以说是在应用层完成了对具体i2c设备的驱动工作。
计划下一篇总结以下几点:
(1)在内核里写i2c设备驱动的两种方式:
● Probe方式(new style),如:
static struct i2c_driver pca953x_driver = {
.driver = {
.name = "pca953x",
},
.probe = pca953x_probe,
.remove = pca953x_remove,
.id_table = pca953x_id,
};
● Adapter方式(LEGACY),如:
static struct i2c_driver pcf8575_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "pcf8575",
},
.attach_adapter = pcf8575_attach_adapter,
.detach_client = pcf8575_detach_client,
};
(2)适配器驱动编写方法
(3)分享一些项目中遇到的问题