分类: LINUX
2013-05-17 17:33:01
作者:曹忠明,讲师。
I2C总线是有Philips公司开发的,它是一种比较简单的总线,接线简单:只有两根线数据线(SCL)和时钟线(SDA),控制简单。所以一些封装较小的器件多使用I2C总线,常见的使用I2C总线的设备有EEPROM、rtc及一些传感器。这里我们介绍下基于linux的I2C设备驱动的编写。
I2C设备驱动的编写有多种方式:
一种是直接操作CPU的I2C控制器,正对于某一个设备写一个字符驱动,这种驱动相对来说比较直接,不需要太依赖于内核相关配置,但是这类设备驱动依赖CPU,可移植性较差。
一种是基于linux内核I2C子系统完成设备驱动的编写,一般内核会继承相关CPU的控制器驱动即使没有也可以通过技术支持可以获得,所以我们只需要使用linux下I2C子系统提供的相关接口来构建我们的设备驱动就行了。这样我们的设备驱动并不依赖于某一个特定的CPU,可移植性较好。
在写驱动之前我们先了解下I2C总线中几个比较重要的概念:
1、 地址
I2C总线上可以连接多个相同或不同的设备,总线怎么样才能知道数据应该发送到那个设备呢,这里需要一个地址来唯一的标识一个设备。I2C设备地址有7位地址和10位地址,那么这个地址是怎么来的呢,其实这个地址我们可以通过相关的芯片手册获得,这里通过一个EEPROM和一个温度传感器来说明。
EEPROM(AT24C02/04/08/16)芯片手册上有如下说明:
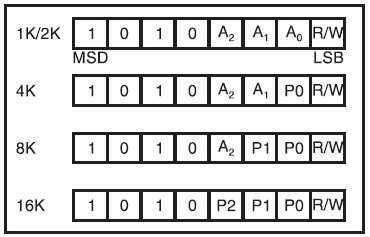
再结合原理图
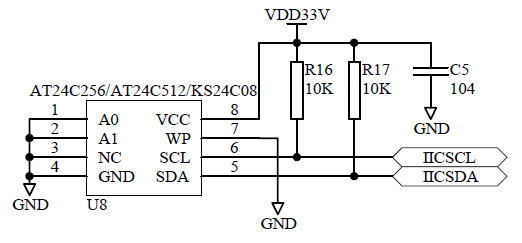
在通过芯片手册我们可以知道EEPROM的地址的前四位为1010,通过原理图A0/A1/及NC的状态我们可以知道后三位为000,这样我们就知道这个EEPROM在I2C总线上的地址为7’b1010000。
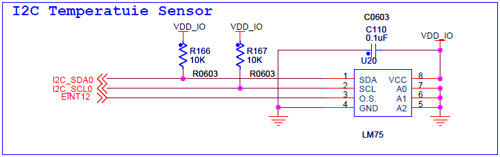
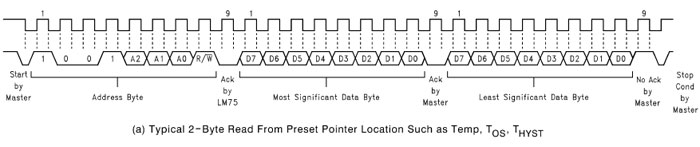
同样我们可以通过如下内容知道温度传感器的地址为7’b1001000
芯片手册:

原理图:
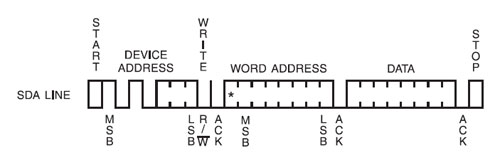
2、 时序
不同的I2C设备有不同的时序,我们也可以说是不同的协议,我们需要了解一些时序相关的东西,我们发送数据是什么时候开始什么时候结束,怎么发送都由这个时序决定。
开始/停止
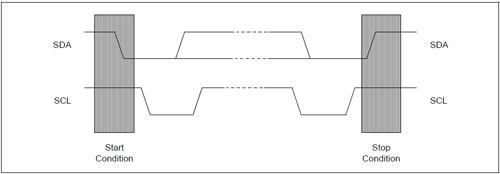
完整时序

现在的CPU多数都有I2C控制器,我们不需要太关心具体时序的实现,这些都由控制器去完成,并且内核已经集成多数CPU的I2C控制器驱动,我们写设备驱动就是按照I2C子系统的要求,为它提供需要的数据即可。
I2C子系统下设备驱动有两种模式,一种是用户模式设备驱动这种驱动依赖I2C子系统中的i2c-dev这个驱动,我们需要在应用程序去封装数据,这需要应用程序的开发人员具备相当的硬件基础,另外一种是普通的设备驱动。分别看下这两种方法的具体实现过程。
用户模式驱动实现:
相关结构体:
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_TEN 0x0010 /* this is a ten bit chip address */
#define I2C_M_RD 0x0001 /* read data, from slave to master */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
struct i2c_rdwr_ioctl_data {
struct i2c_msg *msgs; /* pointers to i2c_msgs */
__u32 nmsgs; /* number of i2c_msgs */
};
上面就是我们向底层传递的结构,我们需要把我们的时序封装成这样的结构然后传递下去就行了。
AT24c04时序

转化为消息结构为:
e2prom_data.nmsgs=2;
(e2prom_data.msgs[0]).len=1; //e2prom 目标数据的地址
(e2prom_data.msgs[0]).addr=0x50; // e2prom 设备地址
(e2prom_data.msgs[0]).flags=0; //write
(e2prom_data.msgs[0]).buf=(unsigned char*)malloc(2);
(e2prom_data.msgs[0]).buf[0]=0x0; //e2prom数据地址
(e2prom_data.msgs[1]).len=1; //读出的数据
(e2prom_data.msgs[1]).addr=0x50; // e2prom 设备地址
(e2prom_data.msgs[1]).flags=I2C_M_RD; //read
(e2prom_data.msgs[1]).buf=(unsigned char*)malloc(1);//存放返回值的地址。
(e2prom_data.msgs[1]).buf[0]=0; //初始化读缓冲
这里我们封装了两个消息,在这个时序中操作模式改变了,所以我们必须封装为两个时序,如果操作模式不变封装一个消息就可以了比如如下时序:
e2prom_data.nmsgs=1;
(e2prom_data.msgs[0]).len=1; //e2prom 目标数据的地址
(e2prom_data.msgs[0]).addr=0x50; // e2prom 设备地址
(e2prom_data.msgs[0]).flags=0; //write
(e2prom_data.msgs[0]).buf=(unsigned char*)malloc(1);
(e2prom_data.msgs[0]).buf[0]=0x0; //e2prom数据地址
接着我们可以看看别的设备的时序大家可以发现大同小异!
我们把刚才封装的消息通过ioctl发下去就能够完成数据的读写了。例程如下:
int main()
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
{
int fd,ret;
struct i2c_rdwr_ioctl_data e2prom_data;
fd=open("/dev/i2c-0",O_RDWR);
if(fd<0)
{
perror("open error");
}
e2prom_data.nmsgs=2;
e2prom_data.msgs=(struct i2c_msg*)malloc(e2prom_data.nmsgs*sizeof(struct i2c_msg));
if(!e2prom_data.msgs)
{
perror("malloc error");
exit(1);
}
ioctl(fd,I2C_TIMEOUT,1);/*超时时间*/
ioctl(fd,I2C_RETRIES,2);/*重复次数*/
sleep(1);
e2prom_data.nmsgs=2;
(e2prom_data.msgs[0]).len=1; //e2prom 目标数据的地址
(e2prom_data.msgs[0]).addr=0x48; // e2prom 设备地址
(e2prom_data.msgs[0]).flags=0; //write
(e2prom_data.msgs[0]).buf=(unsigned char*)malloc(2);
(e2prom_data.msgs[0]).buf[0]=0x0; //e2prom数据地址
(e2prom_data.msgs[1]).len=2; //读出的数据
(e2prom_data.msgs[1]).addr=0x48; // e2prom 设备地址
(e2prom_data.msgs[1]).flags=I2C_M_RD;//read
(e2prom_data.msgs[1]).buf=(unsigned char*)malloc(2);//存放返回值的地址。
(e2prom_data.msgs[1]).buf[0]=0; //初始化读缓冲
(e2prom_data.msgs[1]).buf[1]=0; //初始化读缓冲
ret=ioctl(fd,I2C_RDWR,(unsigned long)&e2prom_data);
if(ret<0)
{
perror("ioctl error2");
}
printf("%x",(e2prom_data.msgs[1]).buf[0]);
printf("%x\n",(e2prom_data.msgs[1]).buf[1]);
close(fd);
return 0;
}
